
Новыя штучныя мышцы: больш лёгкія, бяспечныя і трывалыя робаты
З даследаванняў Цюрыхскага політэхнічнага інстытута тэхналогія для груп цягліц, больш падобных да чалавечых і адчувальных да ўзаемадзеяння з навакольным асяроддзем
Даследчыкі ETH Zurich нядаўна распрацавалі штучныя мышцы для перамяшчэння робата, але іх рашэнне дае некалькі пераваг у параўнанні з раней вядомымі тэхналогіямі.
Заслугоўваючы далейшага вывучэння, ён можа быць выкарыстаны ва ўсіх выпадках, калі робаты павінны быць мяккімі, а не жорсткімі, або павінны быць больш адчувальнымі пры ўзаемадзеянні з навакольным асяроддзем.
Многія робататэхнікі мараць ствараць робатаў, якія ўяўляюць сабой не толькі камбінацыю з металу або іншых цвёрдых матэрыялаў і рухавікоў, але і больш мяккіх і больш адаптыўных.
«Мяккія» аўтаматы могуць узаемадзейнічаць з навакольным асяроддзем зусім па-іншаму; напрыклад, яны маглі змякчыць удары, як гэта робяць чалавечыя канечнасці, або далікатна схапіць прадмет.
Гэта таксама дало б перавагі адносна спажывання энергіі: сёння рух робатаў звычайна патрабуе шмат энергіі, каб падтрымліваць пазіцыю на працягу доўгага часу, у той час як мяккія сістэмы маглі б лепш захоўваць яе.
Такім чынам, што можа быць больш відавочным, чым узяць за ўзор чалавечыя мышцы і паспрабаваць аднавіць іх?
Бывай, NCCR Robotics: дванаццаць поўных гадоў на службе ў Швейцарыі
Ёсць беспілотнік, які «лазіць» па дрэвах, каб іх абараніць

Кожная натуральная цягліца таксама скарачаецца ў адказ на дастатковы электрычны імпульс
Функцыянаванне штучных цягліц абавязкова заснавана на біялогіі.
Як і іх натуральныя аналогі, штучныя мышцы скарачаюцца ў адказ на электрычны імпульс.
Аднак штучныя мышцы складаюцца не з клетак і валокнаў, а з мяшка, напоўненага вадкасцю (часцей алеем), абалонка якога часткова пакрыта электродамі.
Калі гэтыя электроды атрымліваюць электрычнае напружанне, яны збліжаюцца і выштурхваюць вадкасць у астатнюю частку мяшка, які згінаецца і, такім чынам, здольны падняць цяжар.
Адзін мяшок падобны на кароткі пучок цягліцавых валокнаў.
Некалькі з гэтых мяшкоў могуць быць злучаныя разам, каб сфармаваць поўны рухальны элемент, які таксама называюць актуатарам або, прасцей кажучы, штучнай цягліцай.
Узнагарода ProteusDrone, мяккаму робату з мутантавымі формамі
Сабака-робат: швейцарскае вынаходніцтва, натхнёнае біялогіяй жывёл
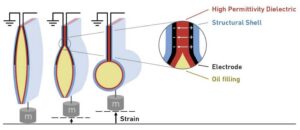
(Ілюстрацыя: Gravert et al/Science/ETH Zurich)
Першапачаткова для электрастатычных прывадаў патрабавалася напружанне ад 6.000 да 10.000 Вольт
Ідэя распрацоўкі штучных цягліц не новая, але дагэтуль існавала сур'ёзная перашкода для іх рэалізацыі: электрастатычныя актуатары працавалі толькі з надзвычай высокім напружаннем, прыкладна ад 6.000 да 10.000 вольт.
Гэтае патрабаванне мела некалькі наступстваў: напрыклад, мышцы павінны былі быць падлучаныя да вялікіх, цяжкіх узмацняльнікаў напругі, яны не працавалі ў вадзе і былі не зусім бяспечныя для чалавека.
Цяпер распрацавана новае рашэнне Роберт Кацшман, прафесар робататэхнікі ETH Zurich, разам са Стэфанам-Даніэлем Гравертам, Эліяй Варыні і іншымі калегамі.
У артыкуле на інфармацыйным сайце «Science Advances» яны апублікавалі артыкул пра сваю версію штучнай мышцы, якая сапраўды мае шэраг пераваг.
Стэфан-Даніэль Граверт, які працуе навуковым супрацоўнікам у лабараторыі Роберта Кацшмана, распрацаваў новую абалонку для сумкі.
Новы англа-швейцарскі беспілотнік для тушэння пажараў у дапамогу пажарным
Такім чынам, у Швейцарыі робаты «пазнаюць» сакрэты трэкінгу

(Фота: Граверт і іншыя, Science, 2024)
Рашэнне на будучыню? Сёння гэта сегнетаэлектрычны матэрыял з высокай пранікальнасцю
Даследчыкі называюць новыя штучныя мышцы актуатарамі HALVE, дзе HALVE расшыфроўваецца як «Гідраўлічна ўзмоцнены нізкавольтны электрастатычны».
«У іншых актуатараў электроды размешчаны на вонкавым боку корпуса. У нас абалонка складаецца з некалькіх слаёў. Мы ўзялі сегнетоэлектрычны матэрыял з высокай пранікальнасцю, гэта значыць здольны назапашваць адносна вялікую колькасць электрычнай энергіі, і злучылі яго са слоем электродаў. Затым мы пакрылі ўсё палімернай абалонкай, якая мае выдатныя механічныя ўласцівасці і робіць сумку больш устойлівай».- тлумачыць ён.
Такім чынам даследчыкі змаглі знізіць неабходнае напружанне, таму што значна больш высокая дыэлектрычная пранікальнасць сегнетоэлектрычнага матэрыялу дазваляе дасягнуць вялікіх сіл, нягледзячы на нізкае напружанне.
Стэфан-Даніэль Граверт і Элія Варыні не толькі разам распрацавалі абалонку прывадаў HALVE, але і пабудавалі самі прывады ў лабараторыі для выкарыстання ў двух канкрэтных робатах.
У Тэль-Авіве лабараторыя Enel па выкарыстанні штучнага інтэлекту і робататэхнікі ў энергетыцы
Вось так робат Atlas ужо можа з намі працаваць і ўзаемадзейнічаць
(Фота: скрыншот відэа Gravert et al, Science, 2024)
Тэхнічныя «шчыпцы» і «рыбкі» паказваюць, на што здольны мускул, створаны ў Швейцарыі
Адным з такіх прыкладаў робата з'яўляецца захоп вышынёй 11 сантыметраў з двума пальцамі.
Кожны палец рухаецца трыма паслядоўна злучанымі кішэнямі прывада HALVE.
Невялікая батарэйка забяспечвае робата 900 Вольтамі.
Акумулятар і блок харчавання разам важаць усяго 15 грамаў.
Увесь суппорт, уключаючы сілавую і кіруючую электроніку, важыць 45 г.
Захоп можа захапіць гладкі пластыкавы прадмет з дастатковай сілай, каб вытрымаць уласную вагу, калі прадмет падымаецца ў паветра з дапамогай вяроўкі.
«Гэты прыклад выдатна дэманструе, наколькі маленькія, лёгкія і эфектыўныя прывады HALVE. Гэта таксама азначае, што мы зрабілі велізарны крок да нашай мэты па стварэнні інтэграваных сістэм, якія кіруюцца цягліцамі»., - задаволена кажа Кацшман.
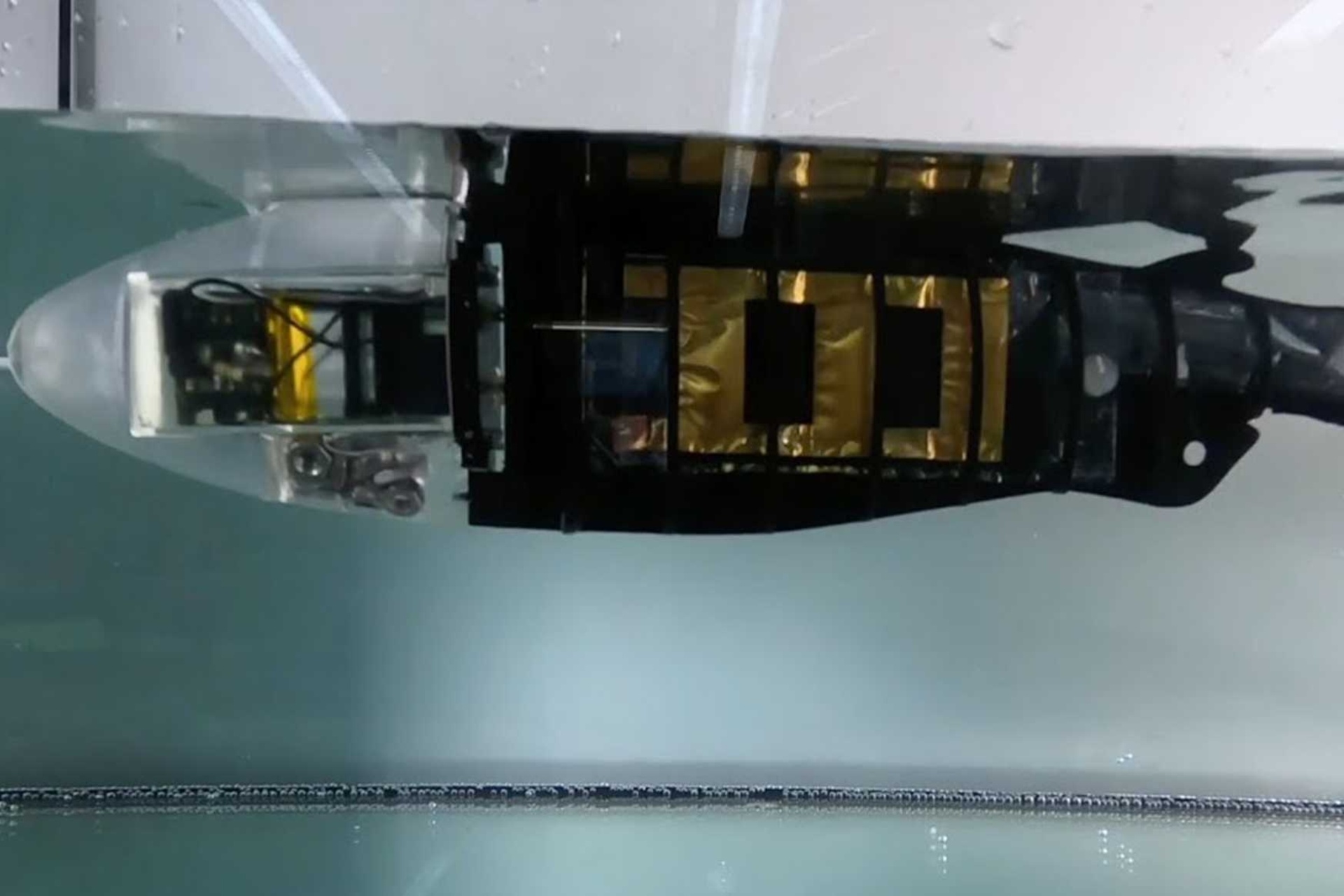
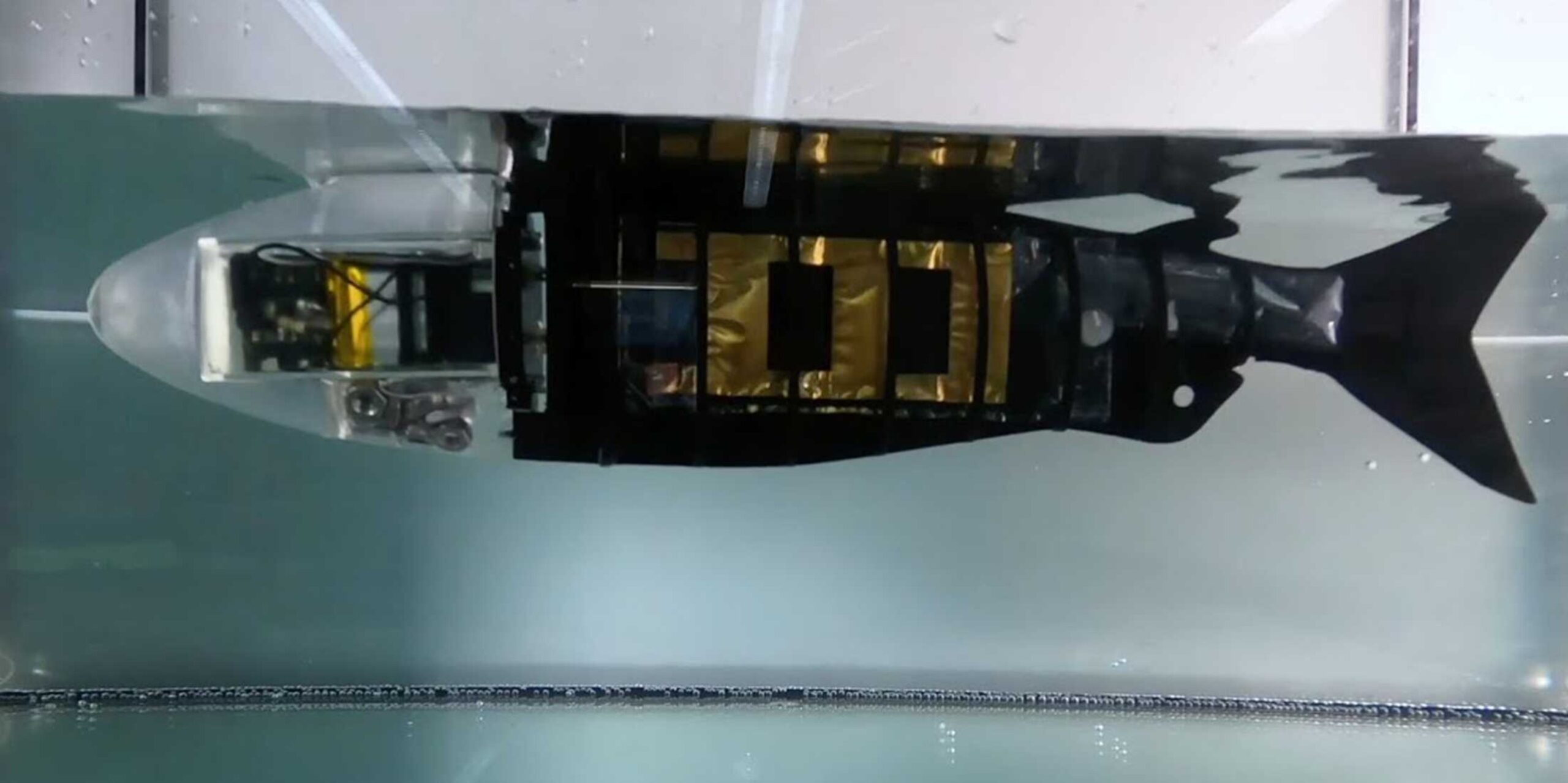
Другі аб'ект - плывец, падобны на рыбу, даўжынёй амаль 30 сантыметраў, здольны лёгка перасоўвацца ў вадзе.
Ён складаецца з «галавы», якая змяшчае электроніку, і гнуткага «цела», да якога прымацаваны «Гідраўлічна ўзмацняюцца нізкавольтныя электрастатычныя» прывады.
Гэтыя прывады рухаюцца па чарзе ў рытме, які стварае тыповы рух пры плаванні.
Аўтаномная рыба можа выйсці са стану стазіса з хуткасцю тры сантыметры ў секунду за 14 секунд, і ўсё гэта пагружаная ў звычайную ваду з-пад крана.
Сабака-робат: швейцарскае вынаходніцтва, натхнёнае біялогіяй жывёл
У Швейцарыі Федэральная палітэхніка за празрысты і надзейны штучны інтэлект

Новыя прывады значна больш трывалыя, чым іншыя штучныя мышцы, а таксама воданепранікальныя
Гэты другі прыклад важны, таму што ён дэманструе яшчэ адну новую асаблівасць прывадаў HALVE.
Паколькі электроды больш не абаронены па-за абалонкай, штучныя мышцы цяпер воданепранікальныя і могуць выкарыстоўвацца нават пагружанымі ў электраправодныя вадкасці.
«Рыба ілюструе агульную перавагу гэтых прывадаў: электроды абаронены ад знешняга асяроддзя і, наадварот, навакольнае асяроддзе абаронена электродамі. Такім чынам, вы можаце выкарыстоўваць гэтыя электрастатычныя прывады ў вадзе або дакранацца да іх, напрыклад ", — дадае прафесар Федэральнага тэхналагічнага інстытута ў Цюрыху.
Слаістая структура канвертаў таксама мае яшчэ адну перавагу: новыя актуаторы значна больш трывалыя, чым іншыя штучныя мышцы.
У ідэале канверты павінны мець магчымасць здзяйсняць вялікую колькасць рухаў і рабіць гэта хутка.
Тым не менш, нават найменшая вытворчая памылка, такая як пылінка паміж электродамі, можа прывесці да электрычнага збою, свайго роду «міні-ўдару маланкі».
4 лістапада ў Лазане "Швейцарскі дзень робататэхнікі"
З DroneHub беспрэцэдэнтны… «вальер» для даследаванняў беспілотнікаў

Праблемы з «міні-маланкамі» вырашаны, кампаніі гатовыя да буйнамаштабнай вытворчасці
«Калі гэта адбывалася ў папярэдніх мадэлях, электрод перагараў, ствараючы дзірку ў абалонцы. Гэта дазволіла вадкасці выцячы і зрабіла прывад непрыдатным для выкарыстання ", тлумачыць Стэфан-Даніэль Граверт.
Гэтая праблема была вырашана ў прывадах HALVE, таму што адно адтуліну практычна зачыняецца само сабой дзякуючы ахоўнаму знешняму пластыкаваму пласту.
У выніку корпус застаецца цалкам спраўным нават пасля збою электрычнасці.
Два даследчыкі відавочна шчаслівыя, што зрабілі рашучы прарыў у распрацоўцы штучных цягліц, але яны таксама рэалісты.
Як кажа Роберт Кацшман, «Цяпер мы павінны падрыхтаваць гэтую тэхналогію для буйнамаштабнай вытворчасці, і мы не можам зрабіць гэта тут, у лабараторыі ETH. Не робячы лішніх адкрыццяў, магу сказаць, што мы ўжо рэгіструем цікавасць з боку кампаній, якія жадаюць з намі працаваць».
Напрыклад, штучныя мышцы аднойчы могуць быць выкарыстаны ў новых робатах, пратэзах або носных прыладах.
Іншымі словамі, у тэхналогіях для выкарыстання ў чалавечым целе і на целе...
Маліна з... сілікону, каб інструктаваць робатаў збіраць ураджай
Слушная даніна павагі ад Лугана маладой камандзе робататэхнікі Smilebots



Неабмежаваны захоп, які кіруецца прывадамі HALVE, захоплівае блок PLA
Штучная рыба без прывязі, якая кіруецца прывадамі HALVE, у вадаправоднай вадзе
Вы таксама можаце быць зацікаўлены ў:

У Альта-Адыджэ сёння EDIH NOI з'яўляецца новай кропкай адліку для штучнага інтэлекту
У Бальцана 4,6 мільёна еўра з фонду PNRR будуць выдзелены на паслугі мясцовым кампаніям у галіне алічбоўкі разведкі…
Аўстрыя, Германія і Швейцарыя за «больш інавацыйныя» грузавыя чыгункі
Міністры DACH Леанора Гевеслер, Фолкер Вісінг і Альберт Росці: увядзенне лічбавага аўтаматычнага спалучэння з'яўляецца ключавым элементам

Перакананне ці маніпуляцыя? Генезіс і гістарычнае ўздзеянне PR
Вось як сувязі з грамадскасцю, ад вытанчанага дыялогу Старажытнай Грэцыі да сучаснай лічбавай эпохі, працягваюць прапаноўваць пастаянныя інавацыі
Франчэска КаонГенеральны дырэктар CAON па сувязях з грамадскасцю

Моладзь і крыптавалюты: як даведацца больш пра біткойны…
Знаёмства дзяцей з лічбавымі валютамі і блокчэйнам можа быць захапляльным заняткам, улічваючы іх схільнасць да тэхналогій і інавацый

 //
//